
摘要:森林资源调查是指运用测量、遥感、专业调查等有效手段,了解并掌握林区内动植物及环境状况等的一项工作,是加强生态文明建设、推动高质量发展、推进国家治理体系和治理能力现代化的重大基础工作之一。
关键词:空地一体化;激光雷达;森林资源调查;SLAM
森林资源调查对于及时掌握森林资源信息至关重要,其主要任务是调查区域森林资源的分布、种类、数量及质量等。而测量样方内树木的树种、位置、树高、胸径等信息是森林资源调查的基本需求。传统生态调查数据采集困难,能够获取的结构信息有限,而且人为主观因素对测量结果的影响大。激光雷达技术是近几年关于林业基础数据获取的先进手段可以用来分析林木类型、林木分布情况、林木生长阶段概况、林木覆盖面积变化情况等。
激光雷达主要原理是进行测距和测角。根据激光在空气中的传播,计算激光器到反射物的距离,同时利用角度编码器记录每一处射光线的角度。这些信号经反射、接收、记录、计算,构成三维图像。由于激光雷达具有多次回波特性,激光脉冲在穿越植被空隙时,可返回树冠、树枝、地面等多个高程数据,有效克服植被影响,更精确探测地面真实地形。
本次采用机载激光雷达、影像和背包式激光雷达融合的方式,可以减少人工调查的工作量,提高林业资源调查的效率和精度。
1.1任务内容及目标
(1)作业地点:某地林区;
(2)作业面积:20000平方米;
(3)作业内容:使用机载激光雷达和背包式激光雷达结合的方式获取林间数据;
(4)精度要求:10cm;
(5)作业范围:
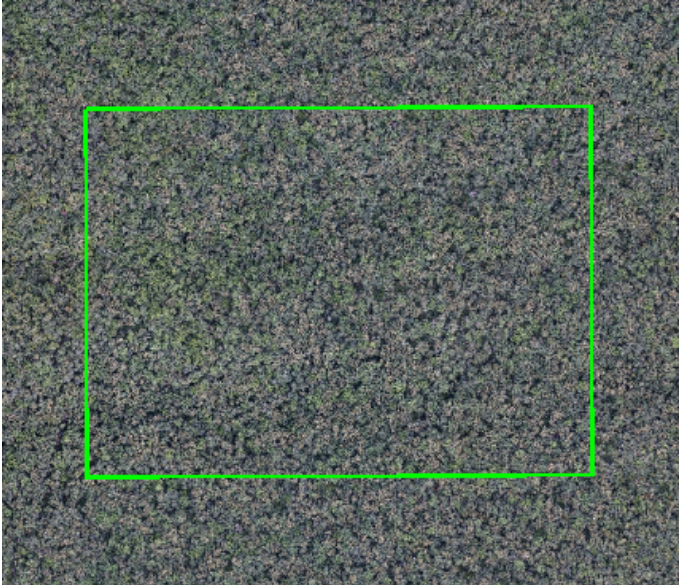
图1 测区作业范围图
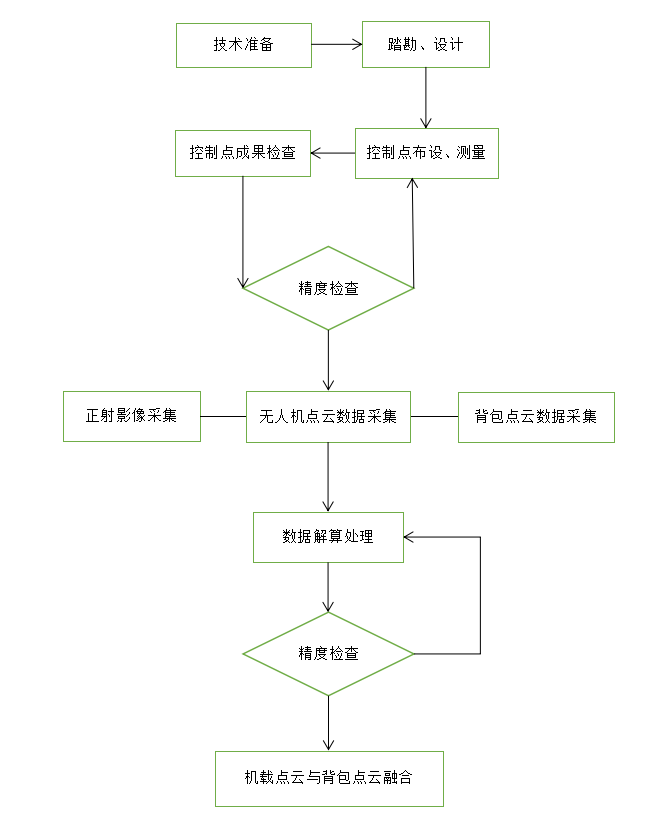
图2 技术流程图
3.1区域环境踏勘与人工获取控制点
本次作业林地区域地形比较复杂、树木比较茂密,精度要求较高。使用cors连接获取不到信号,只能利用人工引入控制点的方式约束点云模型的精度。
(1)确定控制点的数量及分布范围
依照区域环境确定控制点的数量,一般间隔50米获取一个控制点点位,控制点的位置要覆盖整个测区范围。此处确定15个控制点,平均分布于林地内。
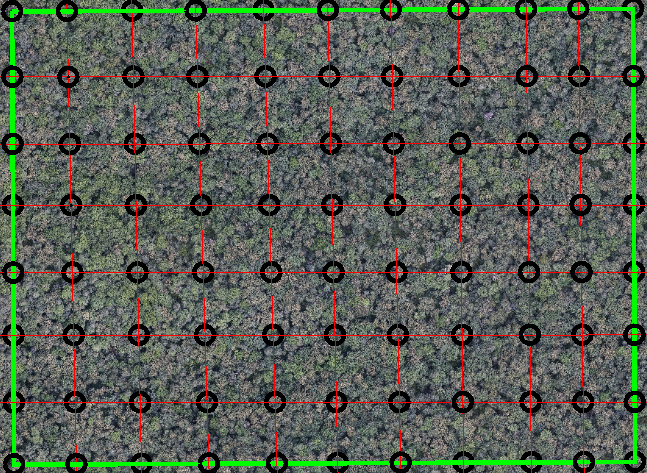
图3 控制点布设规划图
(2)确定控制点的点位位置
因林地比较茂密,RTK获取不到信号,所以只能选取较大的林窗进行布控,未有林窗的部分用全站仪进行观测。控制点的位置放置标靶,采取标靶的位置信息,在作业过程中禁止标靶移动。
(3)记录控制点坐标
利用GNSS接收机或者全站仪获取控制点的坐标点,按顺序记录点坐标。
3.2无人机空中数据采集作业及处理
无人机机载激光技术,是一种通过距离、角度、位置等观测数据直接获取对象表面点的三维坐标,实现地表信息提取和三维场景重建的对地观测技术。无人机机载激光技术具有高精度、高效率、多回波、高分辨率、可生成真实三维模型等优点。
3.2.1外业数据采集
本次项目中空中数据采集作业采用的是飞马D2000无人机系统,它是飞马全新研发的一款小型、长航时但同时能满足高精度测绘、遥感及视频应用的多旋翼无人机系统,可搭载航测模块、倾斜模块、激光雷达模块等,具备多源化数据获取能力。适合于本次机载点云和正射影像的采集。系统标准起飞重量2.8kg,续航时间74分钟。本次作业搭载的是D-LiDAR500激光雷达模块。系统所带自研pos系统,保障数据成果高精度;2430万像素相机,专业20mm镜头,视场角度适用,适用于本次项目点云赋色;续航时间长,作业效率高;点云密度高,100%点频利用率测距能力远,适应场景多;三回波特性,可有效获取地表信息。
首先对研究区进行实地踏勘,找到适合无人机起降的场地,即尽量寻找地势平坦、视野开阔、起降点无遮挡、交通便利的地点。在起降场地确定后,即可进行相关设备展开调试,主要包括地面站架设、飞机组装、飞机检查、安装电池、安装传感器模块、磁罗盘校正。
为保障数据采集整体精度,搭载激光雷达进行点云采集作业时,无人机按飞行旁向重叠度25%,飞行速度13.5米/秒,点云密度75点/m²,相对航高100米的指标进行。
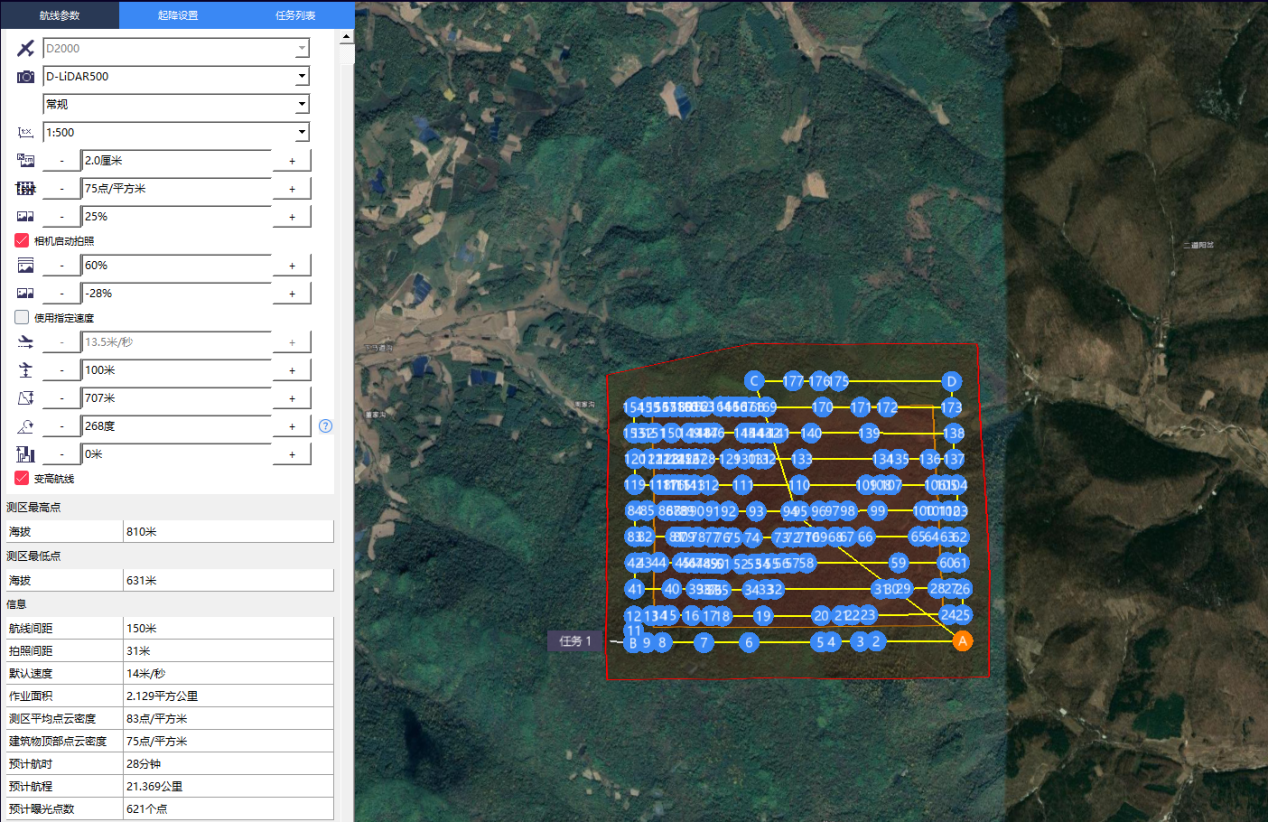
图4 点云采集航线规划图
3.2.2内业数据处理
(1)数据解算
GPS/IMU解算:在飞机长时间航摄过程中,GPS信号的失锁在所难免,一旦发生周跳,就需要重新计算整周模糊度,目前GPS动态定位中最常用的方法是运动中载波相位模糊度解法。联合GPS基站和动态GPS数据,使用正反算发生成固定整数差分GPS航迹线。集成IMU数据和精确的相位差分GPS位置,使用kalman滤波正反算可以生成更加准确的航迹时刻、位置、Omega、Phi、Kappa的航迹线文件。
点云数据解析与检校:在GPS/IMU数据解算后,还需对传感器设备获取的原始点云数据进行解析。飞马D2000无人机获取的原始点云数据格式为:*.LVX,采用无人机管家软件的智激光模块解析。解算时,可设置视场角为-30到30,且最小保留距离为50,以便滤除飞行过程中的雨点、飞鸟等噪声点云。
在初始解析完成后,需对数据进行质量检查。包括航带间分层检查、剖面检查。若航带间数据出现分层现象,那就需要对航带间数据进行平差纠正。
(2)点云数据处理
项目采用点云正射影像赋色的方式提高点云数据的判读性。点云数据的赋色直接采用飞马无人机管家的智点云模块实现,并在处理后直接导出通用LAS格式的点云数据。
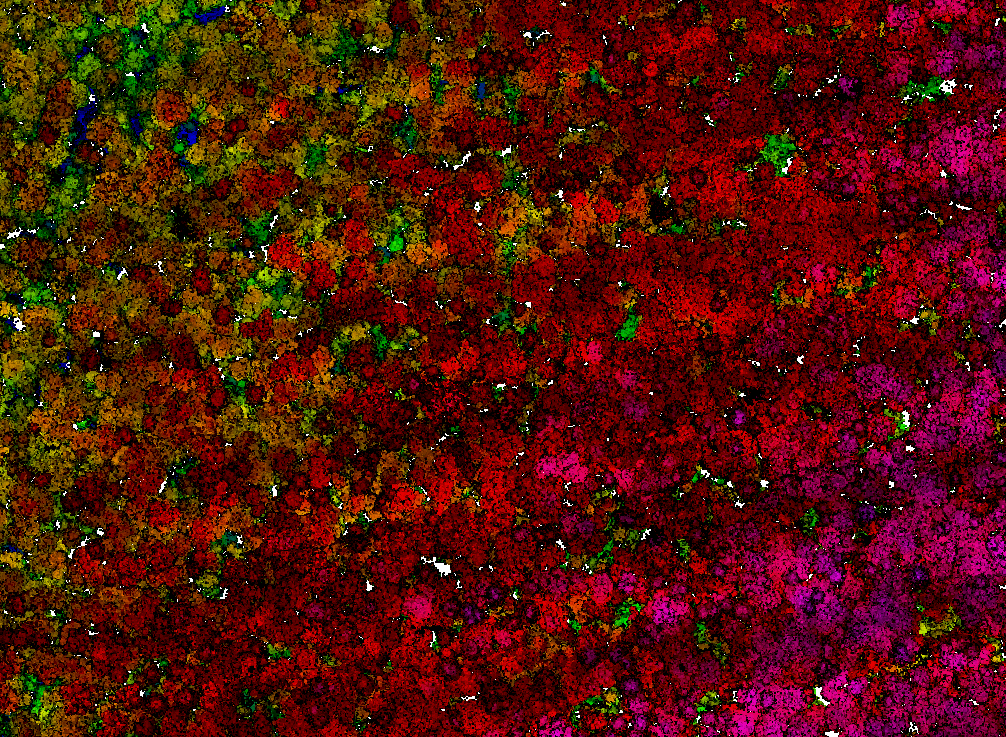
图5 机载点云数据成果图
(3)数据成果
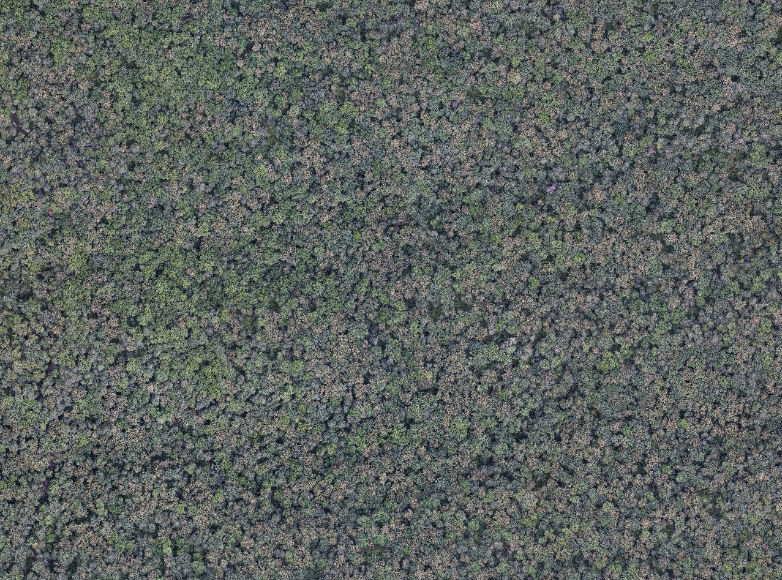
图6 正射影像数据成果图
3.3背包式激光雷达地面数据采集作业及数据处理
本项目采用的移动式背包激光雷达是欧斯徕R8。R8是一款多场景大空间三维结构数据获取设备,基于RTK-SLAM技术,在利用SLAM技术获得位置和模型的同时,将RTK控制点自动引入到SLAM算法中联合解算。其优点是外业数据采集速度极快,稳定的SLAM算法,可快速获得高精度的点云数据。激光雷达360度旋转扫描,能够覆盖全部空间,相比固定式激光雷达,没有缺扫漏扫的问题。不限制单次作业时间,按照场景和项目需求合理安排单次作业时长。点云坐标自动转换到CGCS2000坐标、WGS84坐标或当地坐标等,无需通过导入人工控制点的方式转换坐标。内业点云解算时间短,自动化程度高,无需人工干预,短时间便能获得配准好的点云数据。使用手机操作简单方便,连续采集,无时间限制,可实现室内外、地上地下空间的一体化扫描作业。
3.3.1外业数据采集
装配好设备后,依照规划好的作业路线进行采集作业。需要获取林下CGCS2000坐标系统下的点云数据,因此在使用手持方式作业的同时要获取控制点的点位信息。手持作业方式下引入控制点较为方便,R8手持模块下端的锥形点抵住控制点的中心,同时点击手机控制界面的按钮,这样GNSS接收机或者全站仪获取的控制点点位就与点云模型下的该点点位相关联。

图7 背包式激光雷达扫描作业图
3.3.2内业数据处理
(1)数据解算:打开OmniSLAM Mapper数据处理软件,载入一个新的项目文件,设置坐标、点云密度、图片数量等参数,输入人工获取的控制点坐标,开始自动进行数据解算,生成坐标变换和平差后的点云模型。
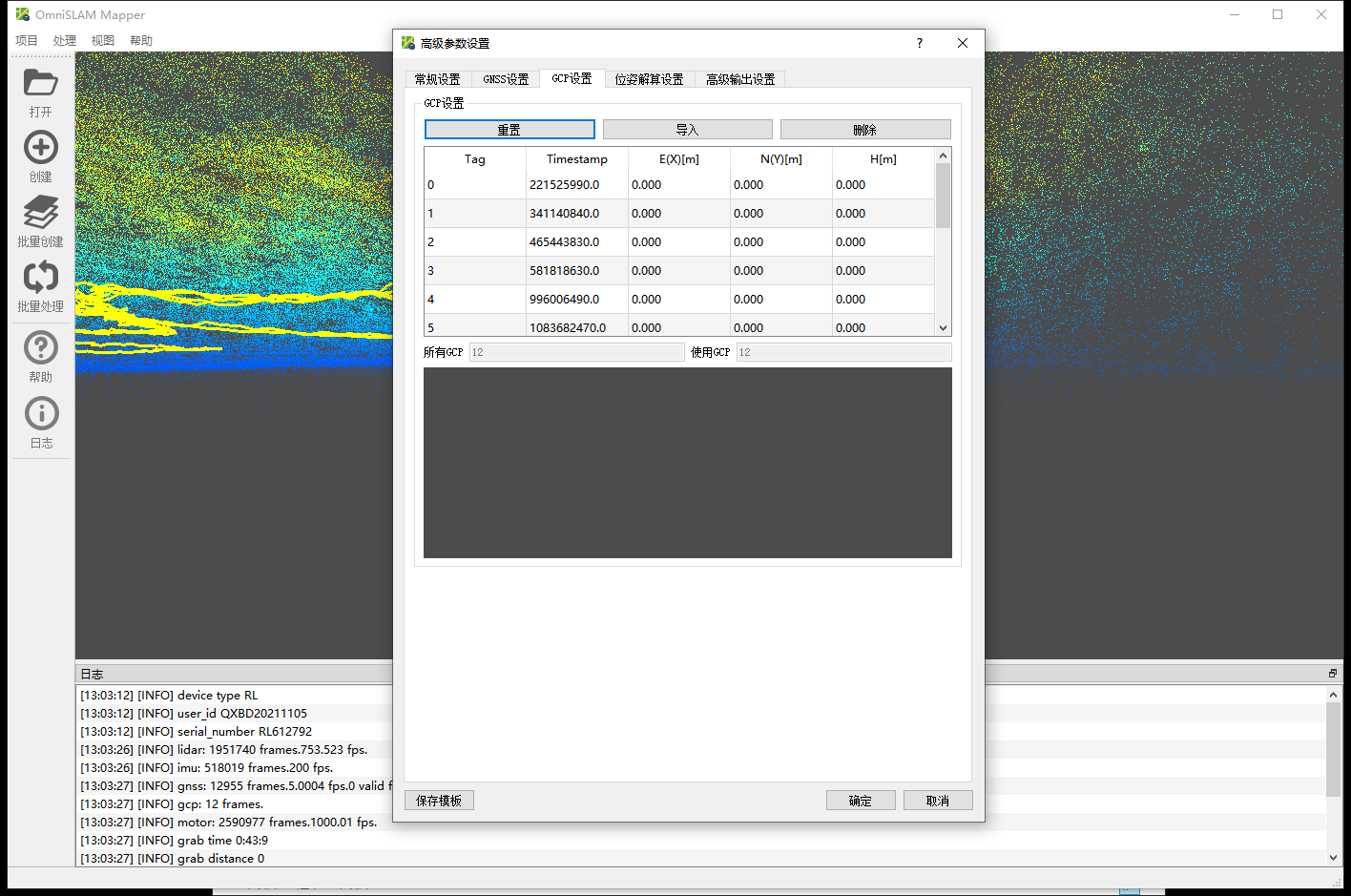
图8 OmniSLAM Mapper数据解算图
(2)数据成果
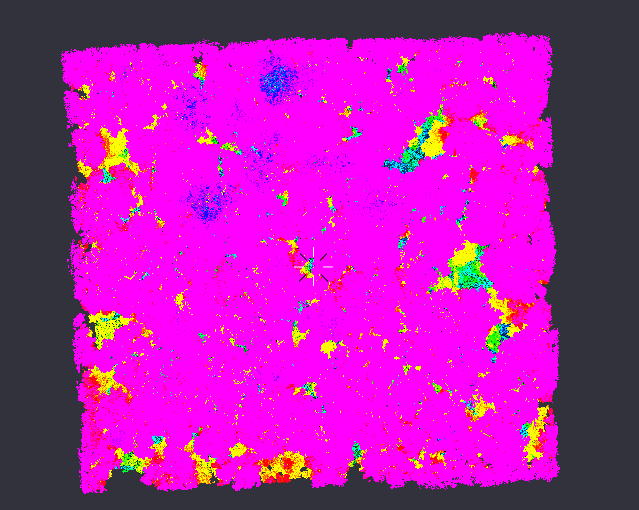
图9 背包式激光雷达点云成果图
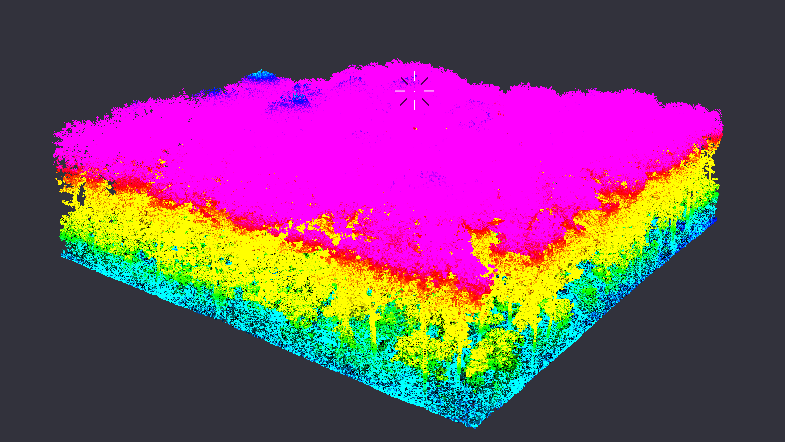
图10 背包式激光雷达点云成果图
3.4数据成果配准
点云模型配准是无人机机载激光和背包式激光扫描在空地一体化中的关键技术,在无人机激光雷达和背包式激光扫描数据各自处理完后在利用软件进行两组点云数据的配准,提高测量的精度和效果。
点云数据配准结果如下图所示,图中白色点云为机载雷达空中扫描的点云成果,绿色和橙色点云是两次背包式激光雷达地面扫描的点云成果。此次成果精度再10公分以内,满足作业要求。
本项目采用飞马无人机机载激光雷达与R8背包式移动三维激光扫描仪的联合作业的方式,获取林业资源。R8背包式移动三维激光扫描仪扫描的点云数据精度极高,机载激光雷达数据辅助背包式扫描仪采集树冠。利用两种激光扫描技术相结合的特点,使得空地一体化测绘无论在效率还是精度上都得到保障,并成功获取林间数据的三维空间信息、点云数据。
更多详细方案,请直接咨询湖南博泽科技有限公司业务会商部。